


1.完整项目描述和程序获取
>面包多安全交易平台:https://mbd.pub/o/bread/ZpyYlpxp
>如果链接失效,可以直接打开本站店铺搜索相关店铺:
>如果链接失效,程序调试报错或者项目合作也可以加微信或者QQ联系。
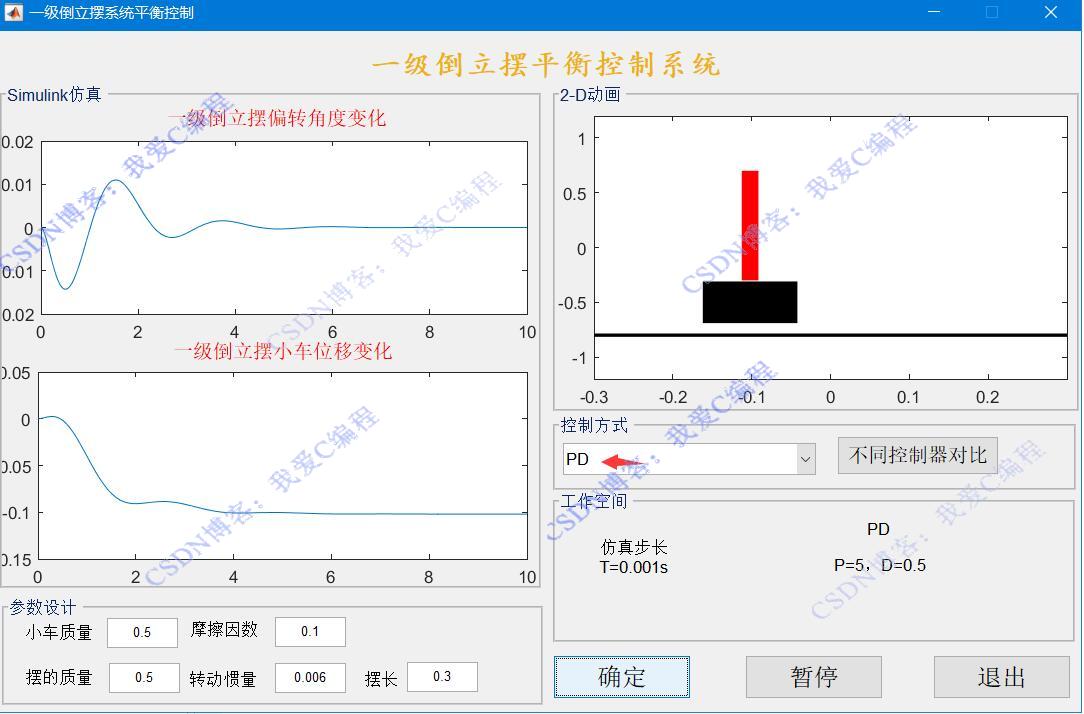
2.部分仿真图预览
3.算法概述
一个可以活动的小车上立着一根不稳定随时会倒下的杆。小车的轮子由电机控制,可以控制小车电机的转动力矩M。同时,也可以获取小车轮子转动的圈数N(可以精确到小数)和杆相对于垂直位置的倾角α.
4.部分源码
.......................................................................................
%%%%%%%%%%%%%%%%%%%%%%选择倒立摆的控制方式%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% --- Executes on button press in pushbutton4.
function pushbutton4_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton4 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
pause;
% --- Executes on button press in pushbutton5.
function pushbutton5_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton5 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
close(gcbf);
clc,clear,close all
% --- Executes on button press in pushbutton6.
function pushbutton6_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton6 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
load mat\R1.mat
y1=y;
t1=t;
load mat\R2.mat
y2=y;
t2=t;
load mat\R3.mat
y3=y;
t3=t;
load mat\R4.mat
y4=y;
t4=t;
load mat\R5.mat
y5=y;
t5=t;
figure;
subplot(211);
plot(t1,y1(:,1),'r','linewidth',2);
hold on
plot(t2,y2(:,1),'b','linewidth',2);
hold on
plot(t3,y3(:,1),'m','linewidth',2);
hold on
plot(t4,y4(:,1),'k','linewidth',2);
hold on
plot(t5,y5(:,1),'g','linewidth',2);
hold on
legend('极点配置法','线性二次型','PID','PI','PD');
title('偏转角变化对比');
xlim([0,10]);
subplot(212);
plot(t1,y1(:,3),'r','linewidth',2);
hold on
plot(t2,y2(:,3),'b','linewidth',2);
hold on
plot(t3,y3(:,3),'m','linewidth',2);
hold on
plot(t4,y4(:,3),'k','linewidth',2);
hold on
plot(t5,y5(:,3),'g','linewidth',2);
hold on
legend('极点配置法','线性二次型','PID','PI','PD');
title('小车位移变化对比');
xlim([0,10]);
0sj_021m
---